Оптимизација перформанси са МПУ-6050: Подешавање, калибрације и апликације
2024-04-25
9192
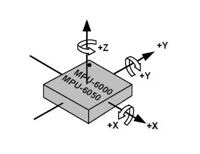
МПУ-6050 Да ли је прва светски интегрисана компонента за прераду покрета за прераду 6 оси, која интегрише 3-осознију гироскоп, 3-оси акцелерометра и скалабилан дигитални процесор кретања (ДМП).Сврха коришћења је да се добије угао нагиба објекта који се мери (као што је куадкоптер, аутомобил за балансирање) на Кс, И и З осовинама, односно угао нагиба, угао нагиба и угао нагиба.Прочитали смо шест података МПУ-6050 (Вредност АД-а убрзања у аку за убрзање и три-оси у угаоној вредности угаоне брзине) путем И2Ц интерфејса.Након прераде фузије у положају, тона, рола и надала се могу израчунати.Као смерни референцу за вредности мерења, дефиниција смера координата сензора је као што је приказано на слици испод, што слиједи принцип десничарског координатног система (који је, десни палца тачка на позитиван правац к-Осовина, кажипрст је указује на позитиван правац оси И-а, а средњи прст указује на позитиван правац З-оси. Правац).
Каталог
Помоћу свог намењеног и2Ц сензорског аутобуса, МПУ-6050 је у могућности да прими улаз директно са спољног 3-осовног компаса, пружајући потпуну 9-Акис МотионФусион ™ излазом.Елиминише проблем од нескладности између комбинованог жироскопа и временске траке убрзива и значајно смањује простор за паковање у поређењу са вишекомпонентним решењима.Када је повезан са магнетометар од три оси, МПУ-60Кс0 је у стању да обезбеди потпуну излазну излазну излазом за главну и2Ц или СПИ порт (имајте на уму да је СПИ порт доступан само на МПУ-6000).
Алтернативе и еквиваленти
- МПУ-3300
- МПУ-6000
- МПУ-6500
Произвођач МПУ-6050
Произвођач МПУ-6050 је ТДК.Након два оснивача ТДК-а, др Иогоро Като и Такеи Такеи, изумио је ферите у Токију, основали су Токио Денкикагаку Когио К.К.1935. године као марки глобалне индустрије електронике ТДК је увек одржавао доминантан положај у областима електронских сировина и електронских компоненти.ТДК-ов свеобухватни и иновативни портфељ који је вођен производ покрива пасивне компоненте, као што су керамички кондензатори, алуминијски електролитски кондензатори, филмски кондензатори, магнетни производи, високофреквентне компоненте, пиезоелектричне уређаје, као и сензори и сензорски системи (као што су температура и притисак,Магнетни и МЕМС сензори) итд. Поред тога, ТДК такође пружа напајање и енергетски уређаји, магнетне главе и друге производе.Брендови производа укључују ТДК, ЕПЦО, Инвенсенденсе, Мицронас, Троницс и ТДК-Ламбда.
Унутрашњи блок дијаграм МПУ-6050
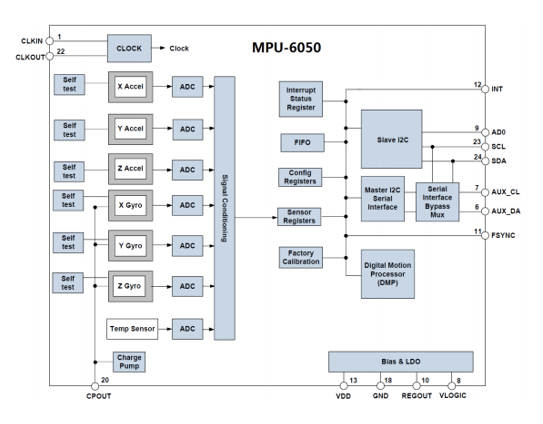
Међу њима су СЦЛ и СДА ииц интерфејси повезани са МЦУ-ом, а МЦУ контролише МПУ-6050 кроз овај ИИЦ интерфејс.Ту је и ИИЦ интерфејс, наиме аук_цл и аук_да.Овај интерфејс се може користити за повезивање спољних робовских уређаја, као што су магнетни сензори, како би се формирао сензор девет осовина.ВЛОГИЦ је напон ИО Порт.Овај ПИН може да подржи најмање 1,8 В.Ми га обично директно повезујемо на ВДД.АД0 је ПИН адреса контроле адресе роб ииц интерфејса (повезан са МЦУ).Овај ПИН контролише најнижи део ИИЦ адресе.Ако је повезан са ГНД-ом, ИИЦ адреса МПУ-6050 је 0к68;Ако је повезан са ВДД-ом, то је 0к69.Имајте на уму да адреса овде не укључује најнижи пренос података (најнижи бит се користи за представљање прочитања и писања).На мвбаланцедстц15, АД0 је повезан са ГНД-ом, тако да је ИИЦ адреса МПУ-6050 је 0к68 (искључујући најнижи бит).
Иницијализирајте ИИЦ интерфејс
МПУ-6050 користи ИИЦ за комуникацију са СТЦ15, па морамо иницијализовати СДА и СЦЛ линије података које су прво повезане са МПУ-6050.
Ресетирајте МПУ-6050
Овај корак обнавља све регистре унутар МПУ-6050 на њихове подразумеване вредности, које се постижу писањем 1 до бит7 регистра за управљање напајањем 1 (0к6б).Након ресетовања, регистар управљања напајањем 1 ће се вратити на задану вредност (0к40), а овај регистар мора накнадно бити постављен на 0к00 да би се пробудио МПУ-6050 и ставио га у нормалну радну државу.
Подесите асортиман пуне скале угаоне сензор брзине (ГИРО) и сензор за убрзање
У овом кораку поставили смо асортиман Фулл-скала (ФСР) два сензора кроз регистар конфигурације ГИРОСЦОПЕ (0к1б) и регистар конфигурације убрзања сензора (0к1ц).Обично смо поставили асортиман пуног обима гироскопа на ± 2000дпс и целокупни распон акцелерометра до ± 2Г.
Постављање осталих параметара
Овде такође морамо да конфигуришемо следеће параметре: Искључите прекиде, онемогућите АУКС И2Ц интерфејс, онемогућите ФИФО, подесите брзину узорковања жироскопа и конфигуришите дигитални филтер са ниским пролазницима (ДЛПФ).Пошто не користимо прекиде за читање података у овом поглављу, функција прекида мора бити искључена.У исто време, пошто не користимо АУКС И2Ц интерфејс за повезивање других спољних сензора, такође морамо да затворимо овај интерфејс.Ове функције се могу контролисати путем регистра прекида (0к38) и регистра за корисничку контролу (0к6а).МПУ-6050 може да користи ФИФО да чува сензорске податке, али нисмо је користили у овом поглављу, тако да сви ФИФО канали морају бити затворени.То се може контролисати путем ФИФО-овог регистра (0к23).Подразумевано је вредност овог регистра 0 (односно ФИФО је онемогућен), тако да можемо директно да користимо задану вредност.Стопа узорковања жироскопа контролише се регистар раздјелника узорковања (0к19).Обично постављамо ову стопу узорковања на 50. Конфигурација дигиталног филтра ниског пролаза (ДЛПФ) је завршена путем конфигурационог регистра (0к1А).Генерално гледано, поставићемо ДЛПФ на пола пропусне ширине да би уравнотежили тачност података и брзину реакције.
Конфигуришите системски извор сата и омогућите угаони сензор брзине и сензор убрзања
Подешавање система система за систем зависи од регистра за управљање напајањем 1 (0к6б), где најнижа три бита овог регистра одређују избор извора сата.Подразумевано је ова три бита постављена на 0, што значи да систем користи интерни 8МХз РЦ осцилатор као извор сата.Међутим, у циљу побољшања тачности сата, често га постављамо на 1 и изабрали је Кс-Акис Гиросцопе ПЛЛ као извор сата.Поред тога, омогућавање угаоног сензора брзине и сензора убрзања је такође важан корак у процесу иницијализације.Обе операције се спроводе путем регистра управљања напајањем 2 (0к6ц).Једноставно подесите одговарајући бит на 0 да бисте активирали одговарајући сензор.Након завршетка горе наведених корака, МПУ-6050 може да унесе нормалан радни статус.Они који нису посебно постављени усвојене ће задане вредности подешене вредности од стране система.
Како функционише МПУ-6050?
Гиро Сенсор
Сензор је опремљен жировом изнутра, који ће увек остати паралелно са почетним правом због жироскопских ефекта.Стога можемо израчунати смер и угао ротације откривањем одступања гиро из почетног смера.
Сензор акцелерометра
Сензор акцелерометра је уређај који може да мери убрзање и ради на основу принципа пиезоелектране.Током убрзања, сензор мери инерцијална сила која се наноси на масовни блок, а затим израчунава вредност убрзања користећи Невтонов други закон.
Дигитални процесор за кретање (ДМП)
ДМП је модул за обраду података у Цхип-у МПУ6050 који има уграђени алгоритам филтрирања Калмана за стицање података из Гиросцопа и сензора акцелерометра и прерађује излазне матерње.Ова функција увелико смањује радно оптерећење периферног микропроцесора и избегава мућке профил и податак података.
Напомене:
Куатеррионс: Куатеррионс су једноставни суперцомплексни бројеви.Сложени бројеви су састављени од стварних бројева плус замишљену јединицу И, где и ^ 2 = -1.
Где се користи МПУ-6050?
- Играчке
- Слушалица и преносни играчи
- контролери игара на бази кретања
- БЛУРФРЕЕ ™ технологија (за видео / има стабилизацију слике)
- АирСигн ™ технологија (за сигурност / аутентификација)
- ИнстантГуре ™ препознавање гесте гесте
- Носиви сензори за здравље, фитнес и спорт
- Игра која је омогућена покретом и оквир за пријаву
- МотионЦомманд ™ технологија (за кратке резове гесте)
- услуге засноване на локацији, интересантне тачке и мртве рачуна
- 3Д даљински управљачи за Интернет повезани ДТВС и поставите топ кутије, 3Д мишеве
- Тоуманивхере ™ технологија (за "НО ТОУЦХ" УИ контрола апликација / навигације)
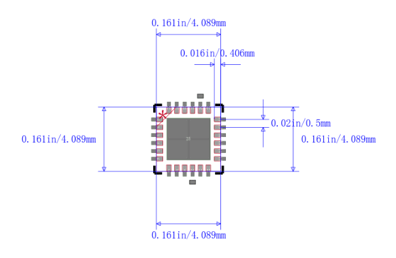
Пакет МПУ-6050
Како смањити шум МПУ-6050?
Можемо предузети следеће начине да смањимо буку МПУ-6050.
Користите калибриране сензоре
Калибрација акцелерометра и жироскопа МПУ-6050 могу да елиминишу пристраност и грешку сензора и тако смањују ефекат буке.Процес калибрације обично се састоји од две фазе: статичка калибрација и калибрација покрета.
Процес филтрирања хардвера
Додавање кондензатора филтра на напајање МПУ-6050 може смањити утицај буке напајања на сензор.У међувремену, током изгледа ПЦБ-а, требало би да покушамо да задржимо МПУ-6050 даље од потенцијалних извора мешања, као што су високе сигналне линије и компоненте велике снаге.
Обрада филтрирања софтвера
Након прикупљања сирових података из МПУ-6050, можемо додати везу за филтрирање софтвера да преприштите почетне податке да бисмо уклонили мешање изазване буком.Обично коришћене методе филтрирања софтвера укључују средње филтрирање, медијално филтрирање, филтрирање Калмана и тако даље.
Користите унутрашњи филтер са ниским пролазом
МПУ-6050 има интерни интегрисани дигитални дигитални ниски филтер, који се може користити за смањење буке високог фреквенција постављањем своје пречишћавање.Конкретно, можемо подесити фреквенцију дигиталног филтра модификујући конфигурацију регистра МПУ-6050 да елиминишем буку високог фреквенција узрокованог узорковањем А / Д.
Прорачун карата за кретање у МПУ-6050
МПУ-6050 је шесто оси акцелерометра и жироскоп сензор који се може користити за мерење покрета и односа објеката.Прорачун путања путовања на основу МПУ-6050 може се реализовати следећим корацима:
Први корак је читање података сензора.Морамо прочитати податке о акцелеромету и жироскопима из сензора МПУ-6050 користећи одговарајуће управљачке програме и функције библиотеке.Ови подаци се обично излазе у дигиталном формату, тако да је потребна нека конверзија и калибрациони рад да их претвори у стварне мерења у физичким јединицама.
Други корак је израчунавање убрзања.Прво, морамо да обрадимо податке из акцелерометра да извуче убрзање објекта у свакој оси.Након тога, да би израчунали брзину и померање објекта у свакој оси, морамо да интегришемо податке о убрзању.Технике нумеричких интеграција, као што су метода ЕУЛЕР-а или Метода Лунгер-Кутта, често се користе у овом процесу како би се осигурала тачност прорачуна расељавања.
Трећи корак је израчунавање угаоне брзине.Употреба података ГИРОСЦОПЕ, угаона брзина објекта у свакој оси може се израчунати.Опет, ове податке треба да се калибришу и претворе да добију угаону брзину у стварним физичким јединицама.
Четврти корак је израчунавање ротације.Интегрисањем података угаоне брзине, може се израчунати угао ротације објекта у свакој оси.То се може урадити коришћењем нумеричких техника интеграције као што су Еулерова метода или метода Лонге-Кутта за израчунавање угла.
Пети корак је спајање података.Комбинујемо податке из акцелерометара и жироскопа да би се добило комплетан став и информације о положају објекта.То се може учинити алгоритмима као што су решивач става на бази растварача или угао ЕУЛЕР-а.
Шести корак је визуализовати резултате.Претварамо исправљачку тачку кретања објекта у сет тачака у 3Д координатном систему и приказујем га користећи одговарајуће алате за визуелизацију за интуитијуће разумевање циљеве предмета и промене става.
Често постављана питања [ФАК]
1. Колико је тачан МПУ6050?
Стечени резултати показали су довољну тачност мању од 1% и поузданост, осигуравајући правилно димензионирање осовине лифтова и високих стандарда лизне индустрије.
2. Како читати податке из МПУ6050?
Да бисте прочитали интерне регистре МПУ6050, Мастер шаље старт старт, а затим и2Ц адреса славе и бит за писање, а затим се репродукција регистра која ће се прочитати.
3. Где се користи МПУ6050?
У носиво здравствено праћење, уређаји за праћење фитнеса.У Дронесу и куадцоптерима МПУ6050 се користи за контролу позиције.Користи се у контроли роботске руке.Управни уређаји за контролу геста руку.
4. је МПУ6050 иМУ?
МПУ6050 ИМУ сензорски блок чита податке из сензора МПУ-6050 који је повезан са хардвером.Блок излази убрзање, угаона стопа и температура дуж осе сензора.
5. Која је обрада МПУ6050?
Ово је уградни процесор МПУ6050 који комбинује податке који долазе из акцелерометра и жироскопа.ДМП је кључ за коришћење МПУ6050 и детаљно је објашњено касније.Као и код свих микропроцесора ДМП је потребан фирмвер да би се покренуо.
тест функције.Највећи економични производи и најбоља услуга су наша вечна посвећеност.
Топли чланак
- Су заменљиви КР2032 и ЦР2016
- МОСФЕТ: Дефиниција, принцип рада и избор
- Инсталација и испитивање релеја, интерпретација дијаграма релеја релеја
- ЦР2016 вс. ЦР2032 Каква је разлика
- НПН вс. ПНП: Која је разлика?
- ЕСП32 ВС СТМ32: Који је микроконтролер за вас бољи?
- ЛМ358 Двоструки оперативни појачало Свеобухватни водич: ПИНОУТЕ, дијаграми кругова, еквиваленти, корисни примери
- ЦР2032 ВС ДЛ2032 ВС ЦР2025 Уређење водич
- Разумевање разлика ЕСП32 и ЕСП32-С3 Техничка и анализа перформанси
- Детаљна анализа круга серије РЦ
 Истраживање способности и апликација НРФ24Л01 комуникационог чипа
Истраживање способности и апликација НРФ24Л01 комуникационог чипа
2024-04-25
 ММБТ3904 НПН транзистор: Његове спецификације, свеобухватни водич за апликацију и ММБТ3904 вс. ММБТ5551
ММБТ3904 НПН транзистор: Његове спецификације, свеобухватни водич за апликацију и ММБТ3904 вс. ММБТ5551
2024-04-25
Врући број дела
 EMZA160ADA101MF61G
EMZA160ADA101MF61G C1005C0G2A102K050BC
C1005C0G2A102K050BC CL21F474ZBFNNNE
CL21F474ZBFNNNE GRJ31MR71H105KE01L
GRJ31MR71H105KE01L 08055C681K4T2A
08055C681K4T2A GJM1555C1H4R6WB01D
GJM1555C1H4R6WB01D CQ0603JRNPO9BN130
CQ0603JRNPO9BN130 LD023C152KAB2A
LD023C152KAB2A GRM2196R2A7R4DD01D
GRM2196R2A7R4DD01D T350E226K010AT
T350E226K010AT
- BA5937AFP-E2
- PIC18F26K22-I/SO
- ICL3232IAZ
- RC0805JR-071ML
- RT0805DRD075K6L
- MCC220-12I01
- PM15CMA060-8
- SKIIP11NAB12T4V1
- MT29F1G08ABBFAH4-ITE:F
- T491C226M010AT7280
- SN74HCT14DR
- 2410ML-05W-B69-B00
- XC2S50E-6PQG208C
- MC74HC595ADTR2G
- STM32F051R8T6
- AD7877ACPZ
- ADE7761AARS-RL
- LTC3456EUF
- M29W160ET70N6
- MV64580-A1-BGG1C000
- PCD50914H/A06/1
- S71GL032A40BFW0B0
- THGBM2G7D4FBAI9
- UPD65943GA-F12-9EU
- XC4008-6PQ208C
- DP8310N
- RTR-6285-0-68MQFN-MT-13
- XC4VFX12-12FF668I
- SA4828IG
- SIL161ACT100
- TC9324FG-026
- DSPIC33FJ256MC710-I
- AN16632A-SZ
- VI-210-EX/F1
- VI-920068B
- 2000-410
- 30R-JMCS-G-TF
- X5045S8/SOP8
- PEB3342HT